
Ten graf č.1 je bez korekcí, alespn tak jsem to pochopil z textu. A DEC sedípřes 10 minut- to je více než dobré.
Expozici nech 1s ., jinak to pointace nedohoní. Ty změny jsou na RA rychlé a velké
PPEC je pro SW montáže nesmysl, tady nemáš nic periodického a bude to celkem určitzě kontraoproduktivní.
Min. pohyb nech na nějakých 0,05-0,08
A hlavně nečekej, že se tím nastavením něco radikálně vylepší- po hodinách testů to určitě sám zjistíš.
PHD2
-
mirkovacik

- Příspěvky: 1027
- Registrován: 10. 06. 2015, 17:26
- Věk: 54
Re: PHD2
Všetky krivky vo všetkých grafoch sú priebeh z jedného "guidingu" v trvaní cca. 24 minút.
Ono vlastne presne - tam guiding nebol. Korekčné signály z PHD2 boli vypnuté. Korekcie preto nie sú ani v logoch zaznamenané.
Čiže je to zaznamenaný vlastný chod montáže a seeingu.
Printscreeny v pôvodnom príspevku sú z okna PHD Log viewer-a, ktorý vie zobraziť priebeh bez driftu spôsobeného chybou v ustavení montáže.
Graf bez korekcie driftu je na priloženom obrázku. Zároveň som tam zachytil položku v menu, ktorou sa dá vyvolať to zobrazenie eliminujúce drift, ktoré som priložil v pôvodnom príspevku. Myslím, že toto zobrazenie by tiež eliminovalo korekčné pulzy, keby boli zapnuté.
Čo sa týka toho PPEC algoritmu, ja som sa kedysi hral s nastavením guidovacieho algoritmu na PHD2. Najlepšie mi fungoval ten s PPEC (ale PPEC v PHD2). Cieľom bolo, aby čo najlepšie a včas naháňal ten rýchly pohyb v priebehu periodickej chyby. (Cieľom nebolo naháňať seeing.) Ale je pravda, že to bolo cvičenie na čistej krivke (simulácii), detaily si už nepamätám. Ale pravda je aj to, že tie nastavenia mi potom fungovali v realite lepšie, ako iné, čo som predtým skúšal, včítane defaultových.
Ono vlastne presne - tam guiding nebol. Korekčné signály z PHD2 boli vypnuté. Korekcie preto nie sú ani v logoch zaznamenané.
Čiže je to zaznamenaný vlastný chod montáže a seeingu.
Printscreeny v pôvodnom príspevku sú z okna PHD Log viewer-a, ktorý vie zobraziť priebeh bez driftu spôsobeného chybou v ustavení montáže.
Graf bez korekcie driftu je na priloženom obrázku. Zároveň som tam zachytil položku v menu, ktorou sa dá vyvolať to zobrazenie eliminujúce drift, ktoré som priložil v pôvodnom príspevku. Myslím, že toto zobrazenie by tiež eliminovalo korekčné pulzy, keby boli zapnuté.
Čo sa týka toho PPEC algoritmu, ja som sa kedysi hral s nastavením guidovacieho algoritmu na PHD2. Najlepšie mi fungoval ten s PPEC (ale PPEC v PHD2). Cieľom bolo, aby čo najlepšie a včas naháňal ten rýchly pohyb v priebehu periodickej chyby. (Cieľom nebolo naháňať seeing.) Ale je pravda, že to bolo cvičenie na čistej krivke (simulácii), detaily si už nepamätám. Ale pravda je aj to, že tie nastavenia mi potom fungovali v realite lepšie, ako iné, čo som predtým skúšal, včítane defaultových.
- Přílohy
-
- 04_PHDLog.png (115.77 KiB) Zobrazeno 2577 x

Re: PHD2
Zdar, stalo se nekomu ze PHDcko zapsalo log jen do preklopeni a po nem ne? Me se to vcera stalo poprve..a to i pres predchozi pouzivani NINy. Nastaveni sem pritom nijak menil.
pri prochazeni snimku jsem si vsim, ze nektere snimky maji mirne ovalky az pidicarky..kdyz sem ale chtel checknout phd guiding log..zjistil jsem ze je zde zaznam jen do 23:52 ( zhruba doba preklopeni) a pak uz ne..prestoze foceni bezelo dal a i pres celkem velky odpad ( asi 20%) jela i pointace az do 4 hodin..zaznam v logu je ale jen prvni cast noci
Nestalo se nekomu? Netusi nekdo pricinu?
Diky
pri prochazeni snimku jsem si vsim, ze nektere snimky maji mirne ovalky az pidicarky..kdyz sem ale chtel checknout phd guiding log..zjistil jsem ze je zde zaznam jen do 23:52 ( zhruba doba preklopeni) a pak uz ne..prestoze foceni bezelo dal a i pres celkem velky odpad ( asi 20%) jela i pointace az do 4 hodin..zaznam v logu je ale jen prvni cast noci
Nestalo se nekomu? Netusi nekdo pricinu?
Diky
- 001.jpg (368.72 KiB) Zobrazeno 2114 x
dob. SW 16" GoTo, N 254/1000 mod
-
amil

- Příspěvky: 704
- Registrován: 25. 10. 2010, 22:37
- Bydliště: Bohouňovice I č.44
- Věk: 87
- Kontaktovat uživatele:
Re: Prosím o radu...................
Zdravím, abych udržel ve středu ty dopadající body na terčíku PHD2 tak to reguluji agresivitou jak v RA i v DE. Nebo je nějáký lepší způsob jak udržet ty body v centru? Děkuji Andrej.
Dobson300/F6 Drbohlav,Newton fotokom. 135/F4,2 Drbohlav,N200/800 Drbohlav, dělostřel. binar 10x80 Meopta r.1956,450Da Mmys,ASI 120 MM mini,ASI 533 Pro,
,NEQ6 Pro ,TV guid. MMys,
http://www.fotovesmirmilosevic.estranky.cz
,NEQ6 Pro ,TV guid. MMys,
http://www.fotovesmirmilosevic.estranky.cz
-
amil
- Příspěvky: 704
- Registrován: 25. 10. 2010, 22:37
- Bydliště: Bohouňovice I č.44
- Věk: 87
- Kontaktovat uživatele:
Re: PHD2
Zdravím,již jsem to celkem vyladil ale létají mi u nás každých 5min letadla na jih z Ruzyně tak mi to vždy /žbluňká/rozhazujou což mám problém.Zatím aspoň takhle.13min, komora 135/550,C450Da. A.
- Přílohy
-
- IMG_0339.jpg (364.92 KiB) Zobrazeno 1943 x
Dobson300/F6 Drbohlav,Newton fotokom. 135/F4,2 Drbohlav,N200/800 Drbohlav, dělostřel. binar 10x80 Meopta r.1956,450Da Mmys,ASI 120 MM mini,ASI 533 Pro,
,NEQ6 Pro ,TV guid. MMys,
http://www.fotovesmirmilosevic.estranky.cz
,NEQ6 Pro ,TV guid. MMys,
http://www.fotovesmirmilosevic.estranky.cz
Re: PHD2
Pokud graf pointace v RA i DEC vypadá podobně a pokud vypneš pointaci v DEC a ten graf je podobný jako při pointování, tak tam převažuje seeing a s tím nejde již nic dalšího dělat. Pokud ti vychází RMS v RA i DEC někde na hodnotách 0,6" až 0,7", tak to může být celkem standardní seeing a nezbývá, než se s ním smířit.
lepší rada žádná než špatná
milantos(šnek)centrum(puntík) cz
milantos(šnek)centrum(puntík) cz
-
amil
- Příspěvky: 704
- Registrován: 25. 10. 2010, 22:37
- Bydliště: Bohouňovice I č.44
- Věk: 87
- Kontaktovat uživatele:
Re: PHD2
Tak RMS RA 0.68" DE 0.74" ale v jednotlivých snímcích i 0.44" a 0.38" Takže počkám po úplňku.Díky.A.
Dobson300/F6 Drbohlav,Newton fotokom. 135/F4,2 Drbohlav,N200/800 Drbohlav, dělostřel. binar 10x80 Meopta r.1956,450Da Mmys,ASI 120 MM mini,ASI 533 Pro,
,NEQ6 Pro ,TV guid. MMys,
http://www.fotovesmirmilosevic.estranky.cz
,NEQ6 Pro ,TV guid. MMys,
http://www.fotovesmirmilosevic.estranky.cz
-
amil
- Příspěvky: 704
- Registrován: 25. 10. 2010, 22:37
- Bydliště: Bohouňovice I č.44
- Věk: 87
- Kontaktovat uživatele:
Re: PHD2
Milane díky za info.A.
Dobson300/F6 Drbohlav,Newton fotokom. 135/F4,2 Drbohlav,N200/800 Drbohlav, dělostřel. binar 10x80 Meopta r.1956,450Da Mmys,ASI 120 MM mini,ASI 533 Pro,
,NEQ6 Pro ,TV guid. MMys,
http://www.fotovesmirmilosevic.estranky.cz
,NEQ6 Pro ,TV guid. MMys,
http://www.fotovesmirmilosevic.estranky.cz

Re: PHD2
Prosím o radu. PHD2 používám už několik let a stále jsem nedokázal vyřešit jednu věc, která mě nesmírně štve. Stačí, aby se při snímání na pár minut přechodně zatáhlo a po počátečním pípání a blikání indikující ztrátu hvězdy si program v poli kamerky pravděpodobně najde nějakou pseudohvězdu a začne pointovat v RA i DEC ostošest. Na všech následujících snímcích mám pak takové nehezké schodečky různých směrů a vše je na vyhození. Přitom mám montáž ustavenou natolik slušně, že by po vyjasnění i po desítkách minut zatažené oblohy mohla klidně pokračovat ve focení. Stačilo by někde mít možnost navolit "Při ztrátě pointační hvězdy přestaň do montáže posílat korekční pulzy". Žádné takové nastavení tam ale není. Hlídání co je a není hvězda je dělané z poklesu intenzity v procentech, takže po nějaké době bez hvězdy to asi vyhodnotí nějaký šum jako hvězdu. Velikost hvězdy v pixelech mi to také nedokáže omezit, zvláště, když je seeing proměnlivý a tvar a velikost obrazu hvězdy se stále mění. Nikde jsem nenašel možnost nastavit absolutní hodnotu intenzity "od - do", který by hvězda musela splňovat, aby se pointovalo. Pro rozsah intenzit mimo tento interval by pro mě ideální akce byla "nedělat nic" a v pointaci pokračovat až po vyjasnění. Pro člověka , který je nucen i po ideálně jasné noci vstát ráno po páté do práce, je spoléhání na program a spánek v podstatě jediná možnost, jak se astrofocení ve zdraví věnovat. Jak tuhle situaci řešit? Pointuji na mono kamerku s pixely 2,4um s biningem 2x2 pomocí OAG v ohnisku 1200mm.
Refraktor 6" F/15 (objektiv Jaegers) , Celestron C-80ED, Newton 300/1200 GSO a 152/600 TS, Canon EOS20D, EOS650D, EOS6D modifikovaný, Triedr 20x80

Re: PHD2
Multistar pointaci jsi zkoušel?
William Optics FluoroStar 110, AFR-IV, ASI533MM Pro, EQ-6 R, Berlebach Planet, SVBony SV305M Pro, Intel NUC, DeepSkyDad AF3 a pár dalších kravin vlastní výroby
Astrofotky
Astrofotky
-
alex

- Příspěvky: 344
- Registrován: 12. 05. 2005, 13:15
- Bydliště: Nové Zámky
- Věk: 67
- Kontaktovat uživatele:
Re: PHD2
Ak sú pseudo hviezdy hotpixely, tak kamera by mala vedieť odčítať Dark a potom by tam už neboli 
A možno odčítavaš - tak nič.
alex
A možno odčítavaš - tak nič.
alex
Celestron NW 254/1200 na EQ-6 PRO, Canon EOS 400Dm, http://ameleg.webzdarma.cz
Re: PHD2
Ano, dark knihovnu mám vytvořenou a hot pixely to tedy odečítá (i když ne úplně poctivě pro zrovna aktuální teplotu kamery - aktualizuji ji jen občas). Když se ale zatáhne, stejně tam vždycky nějaký šum zůstane.
Multi star režim jsem zkoušel párkrát zapnout, ale nikdy se mi to nepovedlo. Nevím jak na to.
V podstatě po najetí na požadovanou pozici dalekohledu a výběr zorného pole dalekohledu vyberu z několika hvězd v poli pointační kamerky jednu, která má slušný tvar a intenzitu, kliknu na ni, upravím expoziční čas (ideálně 0,2 - 0,5s - v horším případě i 1s nebo více), tak, aby nebyla přepálená (ploché maximum profilu jasu) ale ani slabá a ztracená v šumu a pak spustím pointaci. V nastavení kamerky v PHD2 pak zaškrtnu políčko Use subframes, aby se nemusel vyčítat celý chip a odezva byla rychlejší. Pokud nepřejde přes zorné pole mrak a nebo se na pár minut nezatáhne, jde vše jak má. Dithering funguje (nastaven je na maximální rychlost najetí na hvězdu po ditheringu), takže je dalekohled po skončení expozice připraven na další během cca 8 sekund.
Jediný můj problém je, že pokud se i krátkodobě zatáhne nebo přechází mrak, dalekohled od PHD2 dostává trvale pointační pulzy a jede do pr..le (mimo požadované zorné pole). Pak už to zachrání jen to, že se náhodou vzbudím, pointaci vypnu a pošlu ho jemnými pohyby zpět na focený snímek a pointaci opět po výběru pointační hvězdy zapnu. Někdy se nějaké hvězdy chytne sám a pointuje po zbytek noci, bohužel ale fotí jinde, než jsem chtěl já. K řízení focení používám APT, který se k pointaci propojuje se serverem PHD2. Vidlicová montáž vlastní výroby je řízena EQMOD Ascom softwarem. Problém ale já osobně vidím v pokusu PHD2 pointovat (tedy posílat pulsy do montáže) i tehdy, když nemá pointační hvězdu a v mé neschopnosti to nastavit tak, aby to poznal a nepointoval.
Multi star režim jsem zkoušel párkrát zapnout, ale nikdy se mi to nepovedlo. Nevím jak na to.
V podstatě po najetí na požadovanou pozici dalekohledu a výběr zorného pole dalekohledu vyberu z několika hvězd v poli pointační kamerky jednu, která má slušný tvar a intenzitu, kliknu na ni, upravím expoziční čas (ideálně 0,2 - 0,5s - v horším případě i 1s nebo více), tak, aby nebyla přepálená (ploché maximum profilu jasu) ale ani slabá a ztracená v šumu a pak spustím pointaci. V nastavení kamerky v PHD2 pak zaškrtnu políčko Use subframes, aby se nemusel vyčítat celý chip a odezva byla rychlejší. Pokud nepřejde přes zorné pole mrak a nebo se na pár minut nezatáhne, jde vše jak má. Dithering funguje (nastaven je na maximální rychlost najetí na hvězdu po ditheringu), takže je dalekohled po skončení expozice připraven na další během cca 8 sekund.
Jediný můj problém je, že pokud se i krátkodobě zatáhne nebo přechází mrak, dalekohled od PHD2 dostává trvale pointační pulzy a jede do pr..le (mimo požadované zorné pole). Pak už to zachrání jen to, že se náhodou vzbudím, pointaci vypnu a pošlu ho jemnými pohyby zpět na focený snímek a pointaci opět po výběru pointační hvězdy zapnu. Někdy se nějaké hvězdy chytne sám a pointuje po zbytek noci, bohužel ale fotí jinde, než jsem chtěl já. K řízení focení používám APT, který se k pointaci propojuje se serverem PHD2. Vidlicová montáž vlastní výroby je řízena EQMOD Ascom softwarem. Problém ale já osobně vidím v pokusu PHD2 pointovat (tedy posílat pulsy do montáže) i tehdy, když nemá pointační hvězdu a v mé neschopnosti to nastavit tak, aby to poznal a nepointoval.
Refraktor 6" F/15 (objektiv Jaegers) , Celestron C-80ED, Newton 300/1200 GSO a 152/600 TS, Canon EOS20D, EOS650D, EOS6D modifikovaný, Triedr 20x80
-
pedrosanchez

- Příspěvky: 649
- Registrován: 01. 04. 2017, 12:00
- Věk: 45
Re: PHD2
Ahoj, prosim o pomoc  jsem z toho fakt nestastny, dve hodiny priprav vseho a k nicemu.
jsem z toho fakt nestastny, dve hodiny priprav vseho a k nicemu.
Velmi caso nedokazu pointovat. Pise to "star did not move enough", calibration failed.
Jak to mam:
- pointacni kamera QHY, jeden kabel do montaze, druhy do notebooku
- kalibraci jsem provedl na Arcturus, byl docela vysoko (možná chyba?), fotil jsem Jehlu NGC 4565.
- řekl bych, že hvězdy v pointacni kamere byly celkem OK
- hvezdu v PHD vybiram sam, drive se mi to osvedcilo
- dalekohled byl vyvazen, srouby dotazeny
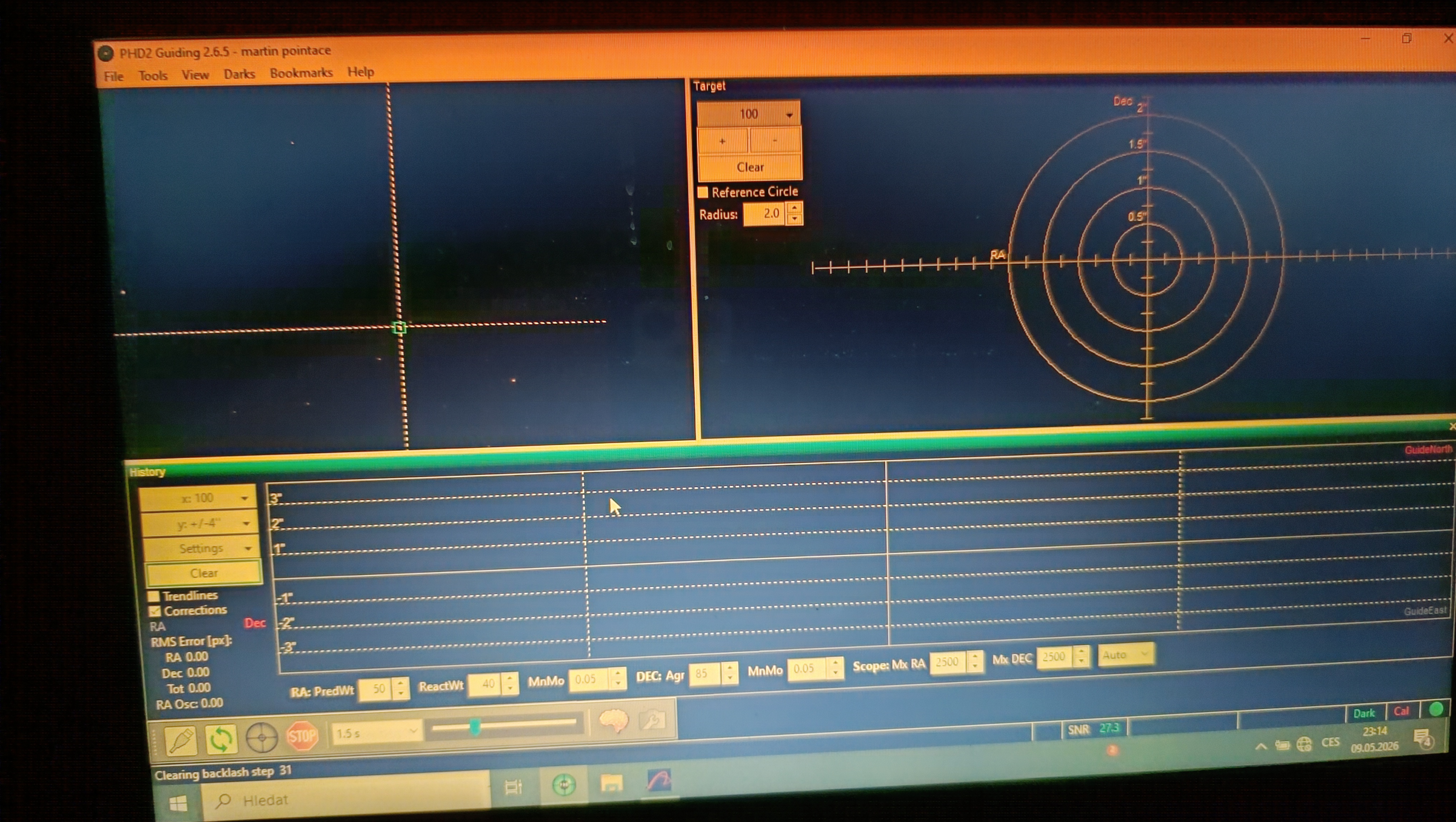
- nastaveni PHD 2 mam zhruba takto https://opu.peklo.biz/p/26/05/10/1778424476-031ba.jpg
Rad bych tomu prisel na kloub, co jsem udelal spatne. AI rika, ze montaz nereaguje na impulsy RA osy a ze mam zvysit pohyb hvezdy na 2000 ms (pri mem ohnisku, DSLR, Newton 200/1000)...ze mam v synscanu zvysit guide speed, podle me mele kraviny.
Kabely a technika jsou asi OK, protoze v minulosti jsem obcas pointoval (pri snimani jineho objektu), proto nevim co jsem ted udelal jinak. A povazte me zklamani, kdyz se konecne vyjasnilo, vyjedu 70 km daleko, ustanovim 50 kg montaz a dalekohled, najdu zajmovy objekt a pak skoncim na pointaci :'(
Moc dekuji za radu.
Velmi caso nedokazu pointovat. Pise to "star did not move enough", calibration failed.
Jak to mam:
- pointacni kamera QHY, jeden kabel do montaze, druhy do notebooku
- kalibraci jsem provedl na Arcturus, byl docela vysoko (možná chyba?), fotil jsem Jehlu NGC 4565.
- řekl bych, že hvězdy v pointacni kamere byly celkem OK
- hvezdu v PHD vybiram sam, drive se mi to osvedcilo
- dalekohled byl vyvazen, srouby dotazeny
- nastaveni PHD 2 mam zhruba takto https://opu.peklo.biz/p/26/05/10/1778424476-031ba.jpg
{kind=link}
Rad bych tomu prisel na kloub, co jsem udelal spatne. AI rika, ze montaz nereaguje na impulsy RA osy a ze mam zvysit pohyb hvezdy na 2000 ms (pri mem ohnisku, DSLR, Newton 200/1000)...ze mam v synscanu zvysit guide speed, podle me mele kraviny.
Kabely a technika jsou asi OK, protoze v minulosti jsem obcas pointoval (pri snimani jineho objektu), proto nevim co jsem ted udelal jinak. A povazte me zklamani, kdyz se konecne vyjasnilo, vyjedu 70 km daleko, ustanovim 50 kg montaz a dalekohled, najdu zajmovy objekt a pak skoncim na pointaci :'(
Moc dekuji za radu.
SW 203/1000, EQ6-R synscan goto, Canon EOS 450D mod., DBK 21AU618.AS, QHY-5 II, ZWO ASI 224 MC
-
pedrosanchez
- Příspěvky: 649
- Registrován: 01. 04. 2017, 12:00
- Věk: 45
Re: PHD2
Nebo mam koupit nejaky ten Ascom kabel? usb a/usb b, ktery povede z montaze do notebooku?
Pak uz mam vsechny porty v notasu plne, DSLR, pointacni kamerka, ted pripadne Ascom, pak myš, takze jeste USB hub.
Kazdopadne takhle by to mohlo fungovat? Nechci ovladat montaz z notebooku, ale z rucky, jde mi jen o zprovozneni pointace.
Takze pak ascom platform instalace a driver pro eq6 r?
Pak uz mam vsechny porty v notasu plne, DSLR, pointacni kamerka, ted pripadne Ascom, pak myš, takze jeste USB hub.
Kazdopadne takhle by to mohlo fungovat? Nechci ovladat montaz z notebooku, ale z rucky, jde mi jen o zprovozneni pointace.
Takze pak ascom platform instalace a driver pro eq6 r?
SW 203/1000, EQ6-R synscan goto, Canon EOS 450D mod., DBK 21AU618.AS, QHY-5 II, ZWO ASI 224 MC